

本文目录
什么是无图驾驶?
无图驾驶是指在自动驾驶技术的支持下,车辆能够在何图像或传感器输入的情况下进行驾驶作。这意味着车辆可以在没有视觉图像、雷达、激光雷达或其他传感器数据的情况下进行导航和控制,完全依赖于预先编程的地图数据和车辆内部的传感器。
无图驾驶的实现依赖于高精度地图、GPS定位、惯性测量单元(IMU)等技术。通过将车辆的位置和运动信息与预先存储的地图数据进行比对和匹配,车辆可以实现自主导航和驾驶行为,包括转弯、加速、减速、停车等作。
无图驾驶技术在自动驾驶领域具有重要意义,它可以提高驾驶的性和效率,并为未来实现完全自动驾驶下基础。然而,目前无图驾驶技术仍然处于研究和开发阶段,需要进一步的技术突破和验证。
机驾驶是什么意思?
机的驾驶模式是机厂商为了照顾正在驾驶车辆,但又遇到不得不使用机的情况的用户而准备的特殊模式。
启动驾驶模式,机可以在无数据时使用语音指令的方式实现拨/接听电话、播放音乐等功能。
部分机的驾驶模式还支持来电/播报功能,来电话时可以语音播报呼叫者的号码或姓名,同时可以语音完成接听/挂断,来时可自动语音提醒并进行内容播报。
都能开的驾驶是什么意思?
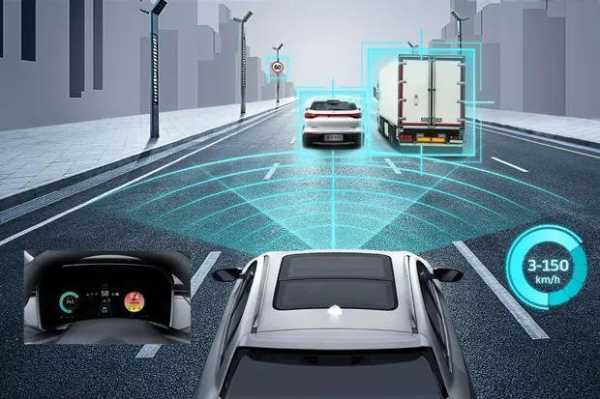
都能开的驾驶是指一种具备自主驾驶能力的汽车技术,可以在范围内的道路上进行驾驶。
这种技术利用先进的传感器、计算机视觉和人工等技术,使汽车能够自动感知周围环境、识别道路标志和交通信号,并做出相应的驾驶决策和作。都能开的驾驶技术的目标是提高驾驶性、减少交通事故,并为驾驶者提供更加便利和舒适的驾驶验。
这种技术的实现需要、企业和社会各界的共同努力,包括制定相关法规和标准、建设交通基础设施等。
驾驶需要习什么?
驾驶需要习的包括但不限于:视觉感知、语音识别、自然语言处理、习、机器习等相关知识。通过这些知识的习,驾驶可以对道路上的情况进行感知和分析,准确地识别交通标志、车辆和行人等,从而做出的决策,确保驾驶和效率。此外,驾驶还需要习自主驾驶的技术和原理,以及对不同驾驶场景的适应能力。
驾驶技术的组成?
驾驶技术通过电脑实现无人驾驶汽车。
驾驶技术本质上涉及注意力吸引和注意力分散的认知工程,主要包括导航、自主驾驶和人工干预三个环节。
驾驶技术的前提条件是,我们选用的车辆满足行车的动力要求,车上的传感器能获得相关视听觉信号和信息,并通过认知计算控制相应的随动。
驾驶技术的导航,解决我们在哪里、到哪里、走哪条道路中的哪条车道等问题;
自主驾驶是在控制下,完成车道保持、超车并道、红灯停绿灯行、灯语笛语交互等驾驶行为;
人工干预,就是说驾驶员在的一系列提示下,对实际的道路情况做出相应的反应。
驾驶技术是工业和信息化结合的重要抓,快速发展将改变人、资源要素和产品的流动方式,颠覆性地改变人类生活。
驾驶技术与无人驾驶是不同概念,驾驶更为宽泛。它指的是机器帮助人进行驾驶,以及在特殊情况下完全取代人驾驶的技术。
驾驶技术的组成:
基于互联网思维应用的驾驶技术的逻辑框架自下而上划分为:感知层、层、分析层和应用层。
(1)感知层具解释为采集驾驶员的行驶过程中涉及到的驾驶信息。
(2)层具解释为驾驶信息的传输、调度、存储。
(3)分析层具解释为驾驶信息的后台大数据处理技术。
(4)应用层具解释为数据分析结果的反馈控制及其应用。




还没有评论,来说两句吧...