

本文目录
川崎机器人怎么接收视觉数据?
机器视觉检测采用CCD照相机将被检测的目标转换成图像信号,传送给的图像处理,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格 / 不合格、有 / 无等,实现自动识别功能。
有哪位大神知道一般工业机器人的视觉的工作原理?简单的概括一下。谢谢?
我简单给你说说嘛。你各人想去。
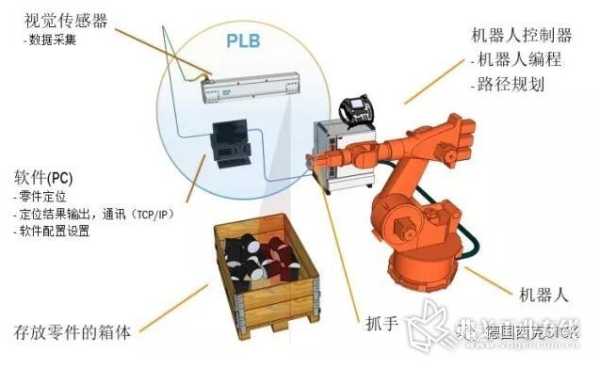
首先,在他的里分为两个大的分工,一个是这机器人的机械工作部分也叫机器本,另一部分是计算机的一个图像处理,最主要的是他的工控的计算机,没有它什么都 是浮云。
机器本你很好理解的,就是有些机器臂呀什么活动关节啦运动的线性的电机呀感应的什么啦,还有测试和管理它这些个功能的一些编程工具和UP处理集成,简单复杂点的是计算机图像处理这部分,他有能捕获图像的,他有这些图像的收集卡、处理器,而后就送给我们的大神,工控计算机。
他的脑是我们有软件编程写好了,说他聪明也聪明说他呆板啦也是够呆板的,它接到图像后拿个指令开始去取一个标量在去取个参考点,在和另一处的图像进行比较得出三维空间指令,就是XYZ什么的值,你自己抽象的想嘛。
这下工控计算就发命令了,它通过串口告诉机器人,它收指令那肯定就动作了修正自己的作业路线。
全过程是我工控计算监控起的,实现 是通过软件。
机器人视觉工作原理?
工作原理:
机器视觉检测采用CCD照相机将被检测的目标转换成图像信号,传送给的图像处理,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格 / 不合格、有 / 无等,实现自动识别功能。
机器人视觉是什么?
kuka机器人视觉定位怎么做?
您好,KUKA机器人视觉定位可以通过以下步骤来实现:
1. 选择合适的视觉传感器:根据应用需求选择合适的视觉传感器,如相机或激光扫描仪。
2. 安装和校准传感器:将传感器安装在机器人上,并进行校准,以确保传感器的准确性和稳定性。
3. 数据采集:使用传感器获取周围环境的图像或点云数据。
4. 特征提取:从采集的数据中提取关键特征,如边缘、角点、颜色等。
5. 特征匹配:将提取的特征与预先定义的模板或目标进行匹配,以确定目标的位置和姿态。
6. 姿态估计:基于匹配结果,使用姿态估计算法计算目标的精确位置和姿态。
7. 机器人控制:将计算得到的目标位置和姿态信息传递给机器人控制,使机器人能够准确地定位和作目标。
8. 实时:在机器人移动或目标位置变化的情况下,持续采集数据并更新目标的位置和姿态信息,以实现实时和定位。
需要注意的是,具的实现方法和算根据应用场景和需求的不同而有所差异。因此,在实际应用中,需要根据具情况选择合适的方法和工具来完成机器人视觉定位任务。




还没有评论,来说两句吧...